Quid est Lidar (LIDAR)? Lidar componit radar vndique facultates cum solutione angulari camerae providendi accurate profunditatem consciam sentiendi ad imaginem perficiendam (Figura 1).

Figura 1: Cameras, radar, et lidar sunt tres technologiae electionis ad sui gubernationem sui iuris. (Imago credit: ADI)
Pars visiva repraesentat visibilitatem cameram vel aurigam, classificationem obiecti et resolutionem lateralem. Obscurae tempestatumque condiciones ut nix, pulvis vel pluvia has vires minuere possunt. Pars radar significat reditum RF signum. Signum hoc est immune tempestatum et tenebrarum, cum etiam spatium mensurae. Lidar pars picturam sentientem perficere potest, providens ulteriorem objectum classificationem, resolutionem lateralem, penetrationem obscuramque pervagantem.
Quomodo lidar opus facit?
Elementa systematis lidaris includunt systema transmissionis undarum quadratam, ambitum scopum, et receptaculum opticum interpretandi distantias ad elementa externa in ambitu. Lidar sentiendi methodus lumine utitur in forma laseris pulsantis ad metiendum range per analysin temporis fugae (ToF) signi redditi (Figura II).
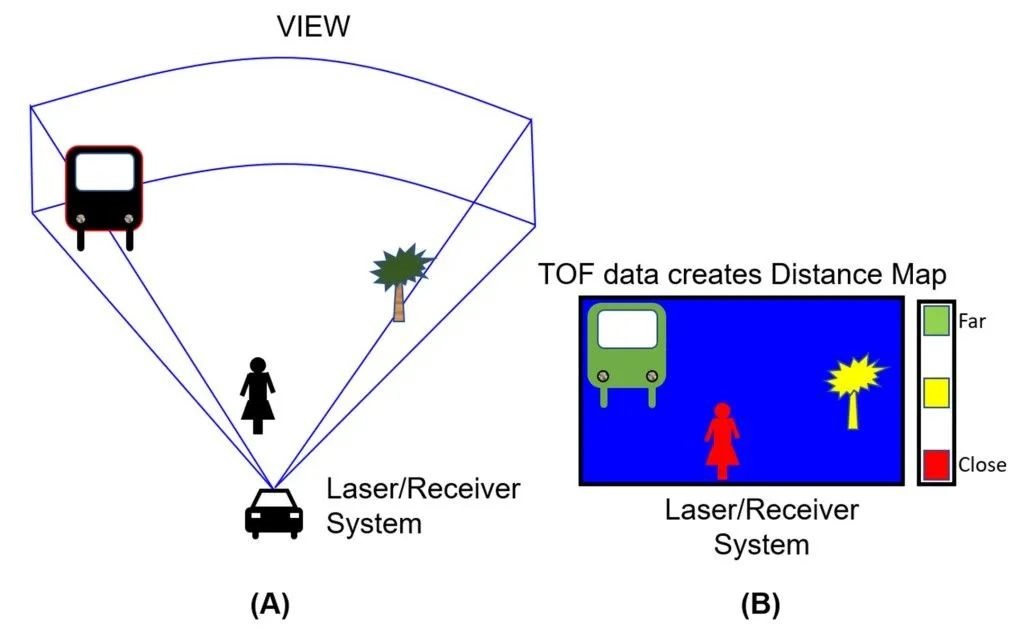
Figura 2: Quaelibet lidar transmissio unitatis triangulare habet "aspectum visum". (Image credit: Bonnie Baker)
Detractio distantiae ab signo digitali optici dependet.
Annuit in digital domain
Solutio lidar ambitus est problema receptionis significationis per transitum autocinetum amplificantis solvere. Scaena inputatio negativa initus venae pulsus a photodetectore accipiendo adhibetur (Figura 3).

Figura 3: Pars electronica lidaris ex laser diode transmisso et duobus receptatoribus photodiodis consistit. (Image credit: Bonnie Baker)
Diodes laser pulsus digitalis transmittit per vitri frustum. Hoc signum etiam in photodiode D2 reflectitur. Processus huius signi praebet tempus transitum et mora electronic in systemate aedificata.
Levis digitalis pulsus signo obiecti percussi et ad systema opticum reflectuntur. Pulsus reversus est praevisus secundae photodiodae D1. Semita electronica pars D1 signum est eadem cum D2 signo. Tempus fugae computari potest postquam duo signa microcontroller perveniunt (MCU).
Forum snapshot
Systemata lidar autocineta utuntur laser pulsante lumine ut distantiam duorum vehiculorum metiatur. Systemata autocineta lidarum utuntur ad celeritatem vehiculorum regendi et systemata fractis in responsione ad subitas mutationes in condiciones negotiationis. Lidar magni ponderis munus agit in semi- vel plene autocineto autocineto adiumento functionum qualium sit concursus monitionis et fugae rationum, custodiae custodiae assistentiae, denuntiatio lane-discessus, monitores caeca-macula, et lecythus adaptive imperium. Lidar autocineta reposuit systemata radar in antecedente systemata automataria autocinetica. Systema Lidar ex paucis metris ad plus mille metra vagari possunt.
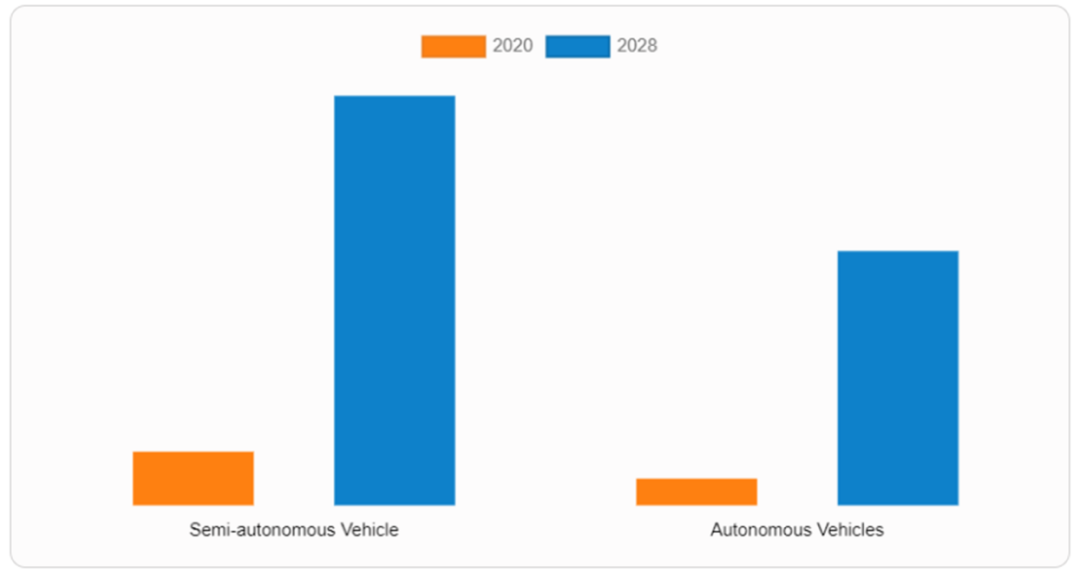
Figura 4: Mercatus autocineticus lidaris in semi-autonomo et plene in applicationes vehiculi sui iuris divisa est. (Image source: Sociae Market Research)
Automata autocinetica in usu late iam sunt, et systemata imaginatio lidarum meliorem condicionem facient. Radar, camerae et instrumenta lidarum adhuc sunt technologiae electionis semi-autonomae et plene sui iuris incessus, et pretium Lidar cadentis et mercatus hanc mutationem accelerant.
Copyright @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - China Fiber Optic Modules, Fiber Coupled Lasers Manufacturers, Laser Components Suppliers All Rights Reserved.